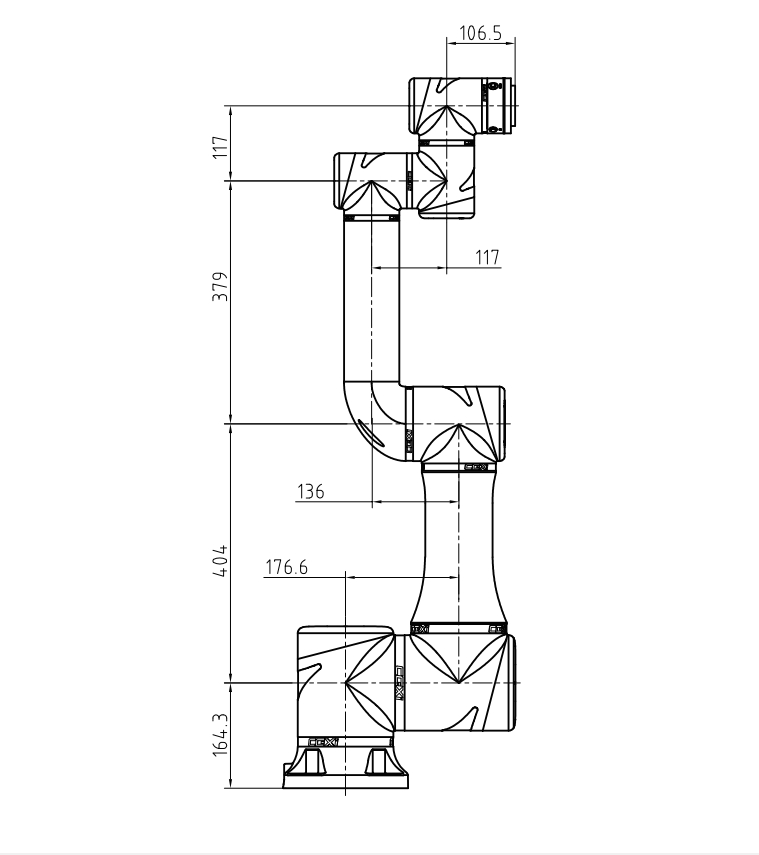

| Model | R18-095S | |
| Robot Arm Net Eeight (without cables) |
35kg | |
| Payload | 18kg | |
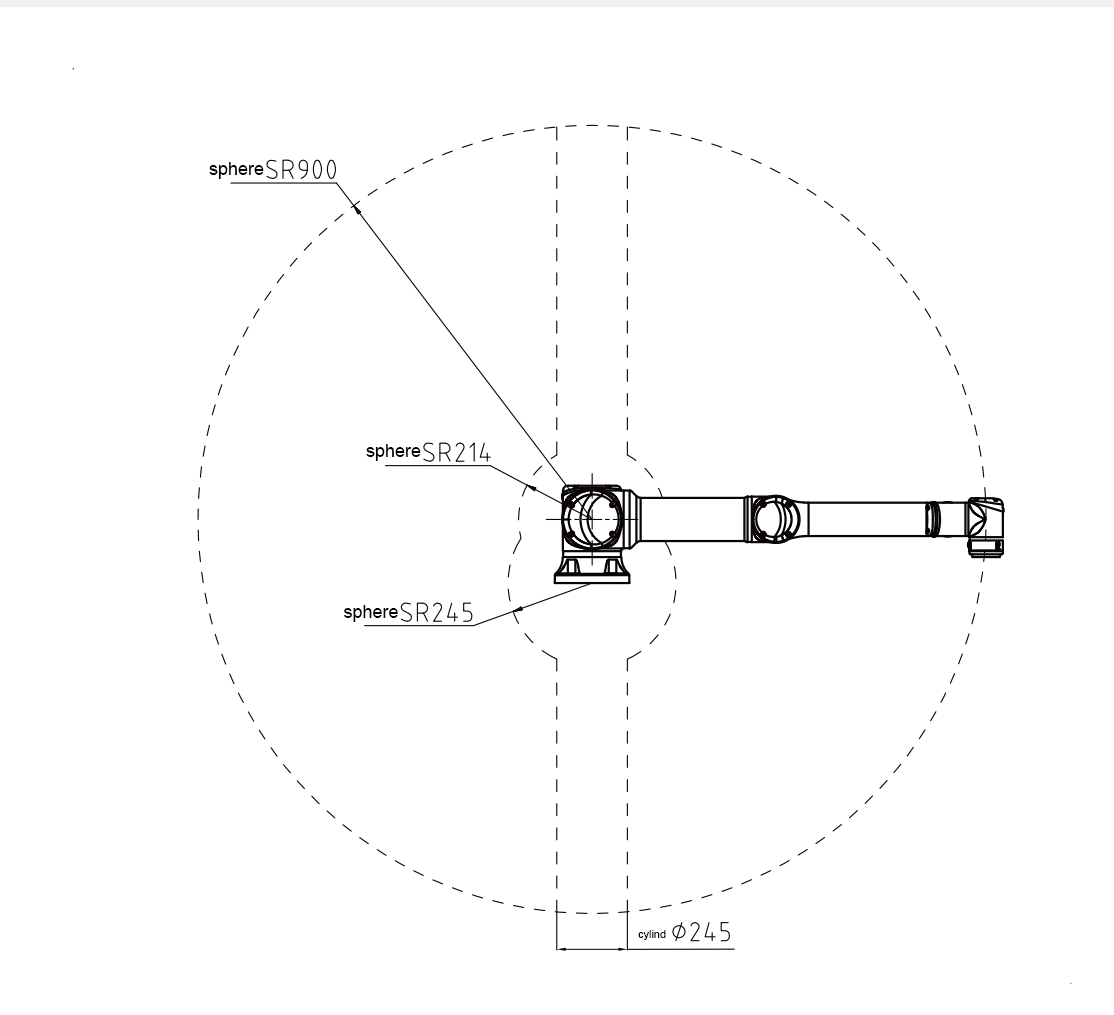
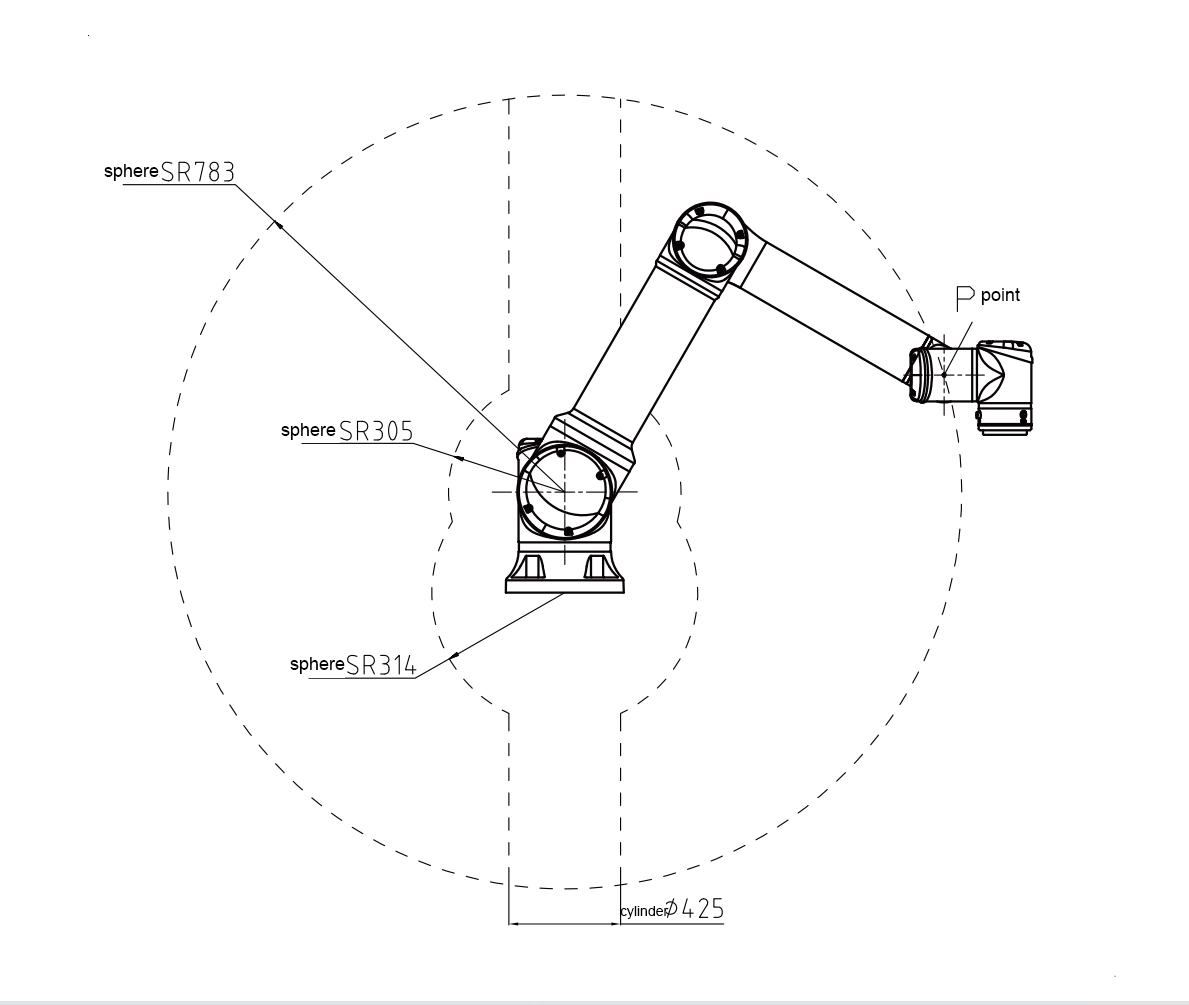
| Armspan | 900mm | |
| Degree of Freedom | 6 | |
| Motion Range | Joint 1 | ±360° |
| Joint 2 | ±360° | |
| Joint 3 | ±165° | |
| Joint 4 | ±360° | |
| Joint 5 | ±360° | |
| Joint 6 | ±360° | |
| Motion Speed | Joint 1 | 150°/s |
| Joint 2 | 150°/s | |
| Joint 3 | 210°/s | |
| Joint 4 | 240°/s | |
| Joint 5 | 240°/s | |
| Joint 6 | 240°/s | |
| EOA Maximum Speed | 2m/s | |
| Repeat Positioning Accuracy (maximum) | ± 0.02mm | |
| Absolute Positioning Accuracy (maximum) | 0.5mm | |
| Control Bus/Frequency | EtherCAT/1kHz | |
| Installation Method | any angle | |
| Typical Power | 550W | |
| Material | Aluminum alloy | |
| Ambient Temperature | -5°C~55°C | |
| Working Environment (humidity) | 5%~90%RH (no condensation) |
|
| Cable Length | 6m | |
| IP GRADE | IP65 | |
| Noise | ≤60dB | |
| Tool End IO Port | digital input*2,digital output*2, analog input*2,output power supply24V/1A*1 |
|
| Tool End Communication Port | EtherCAT*1,RS485*1, output power supply24V/1A*1 |
|